Rolled Dielectric Elastomer Actuators for Cable-Driven Structures
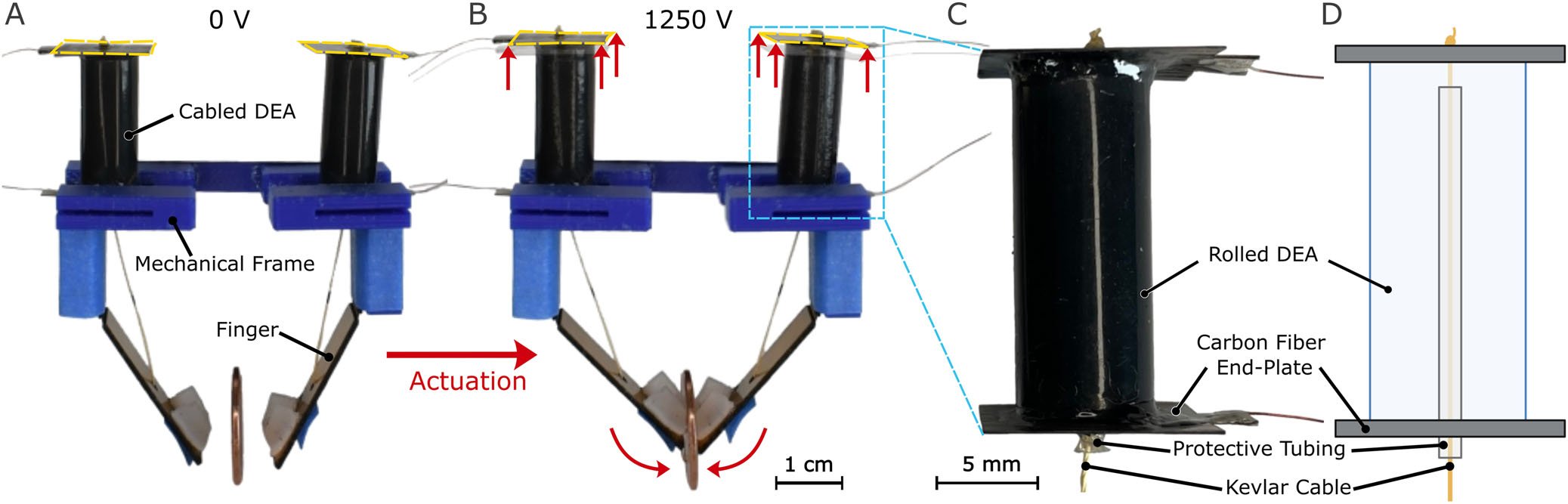
Dielectric elastomer actuators (DEAs) are composed of alternating layers of electrodes and dielectric (insulating) materials, similar to a multi-layered parallel-plate capacitor. When a voltage is applied across the dielectric layer, the oppositely-charged electrodes attract together, squeezing the dielectric material. Due to the compliance of both electrode and dielectric, this results in thinning of the dielectric layer and an areal expansion. We can roll up these planar devices, resulting in an axial extension when voltage is applied. In this work, we show how we can scale up the manufacture of these rolled DEAs through a batch-spray-and-stamp process and we demonstrate how incorporating a cable through the center of the rolled DEA allows for far more design freedom in integrating DEAs with compliant structures.
M.C. Yuen, T. Keroullé, S. Xu, & R.J. Wood. “Electrostatic artificial muscles for cable-driven actuation of compliant mechanisms.“npj Robotics, 3(1), p.12, 2025.
A.J. Cohen, M.C. Yuen, M.N. Corrigan, S. Xu, & R.J. Wood, “Facilitating Dielectric Elastomer Actuator Multilayer Fabrication and Performance Through Low‐Contact‐Resistance Hybrid Electrodes, Scalable Vacuum Filtration, and Adaptive Pre‐Clearing.” Advanced Materials Technologies, 10(6), p.2400787, 2025.